
공간과 좌표계 _ 2편

공간을 표현함에 있어, 가장 직관적이고 단순한 표현법이 카테시안 공간(혹은 직교 좌표계)을 사용하는 것임을 1편에서 확인해보았습니다. 그러나 공간을 다루는 데 있어서 언제나 직교좌표계가 가장 편한 방법이지는 않습니다. 예를 하나 들어보죠.

위의 평면 공간 상의 나선 도형을 수식으로 표현하는 두 가지 방법이 있습니다. 두 방법 중 어느 것이 보기에 편한지 살펴볼까요?
카테시안(직교좌표) 표현법: |
극좌표 표현법: |
누가 보더라도 제곱도, 연산자도, 거기에 결정적으로 아크탄젠트와 같이 머리가 지끈지끈해지는 함수가 없는 극좌표 표현법이 더욱 보기에 편하다는 것은 부정할 수 없겠죠(아직 과 가 정확히 무언지 배우진 않았음에도 불구하구요). 이처럼, 공간 또는 공간에 존재하는 도형을 수학적으로 기술하는 방법은 여러가지가 있겠지만, 어떤 방법이 편리한지는 케이스 바이 케이스입니다. 따라서 우리는 공간을 기술하는 다양한 좌표계에 대해 공부해야 할 필요성이 있습니다.
위에 예시로 보여드린 좌표계, 평면 공간을 기술하는 극좌표계부터 설명을 시작해보도록 하죠.
“ 극좌표계
- Definition 4.4. Polar Coordinates
2차원 카테시안 공간(혹은 평면)상의 점 에 대하여, 원점와 사이의 거리를 , 와 양의 방향의 x-축 사이의 각도를 라 하였을 때,로 표현된다. 이 때, 두 실수 쌍 를 점 의 극좌표(polar coordinates)라고 하며, 이러한 방식으로 공간 상의 특정 지점을 표시하는 좌표계를 극좌표계(polar coordinates system)이라고 한다.
정의에서 곧장 알 수 있듯, 한 점을 표시하는 는 유일한 값이 아니라, 만큼의 차이가 나는 모든 값들의 집합으로 볼 수 있습니다.1
또한 정의에 따르면 이어야만 합니다. 손쉽게 다음을 추가로 정의하여, 의 범위 또한 실수 전체로 확장시켜볼까요.

그리고 사이의 변환 관계는 다음과 같습니다.
- Sample Problem 4.3.
극좌표계 로 표현된 다음의 식 를 직교좌표 로 나타내고, 해당되는 도형을 그려라.

카테시안 공간의 점 표현(앞으로 좌표계의 개념으로서 타 좌표계와 구분하기 위해 직교좌표계라는 용어로 통일하도록 하겠습니다)은 x축에서 떨어진 거리, 그리고 y축에서 떨어진 거리라는 두 개의 거리 변수를 사용했습니다. 반면, 극좌표계에서는 원점에서 떨어진 거리, 그리고 x축을 기준으로 하는 각도라는 거리변수 + 각도변수를 점의 표현에 사용하였죠.
눈치채셨겠지만, 공간을 표현하는 방식에 각도의 측정이 들어감으로써 새로운 좌표계가 만들어질 수 있던 것입니다. 이는 3차원 입체공간으로 확장시켰을 때에도 마찬가지겠죠? 이제는 공간을 표현하는 독립 변수가 3개여야 하므로, 두 가지 조합이 만들어질 수 있습니다. 거리변수 2개와 각도변수 1개, 그리고 거리변수 1개와 각도변수 2개. 각각을 우리는 원통 좌표계, 구면 좌표계라 부릅니다.
“ 원통좌표계
- Definition 4.5. Cylindrical Coordinates
3차원 카테시안 공간(혹은 입체)상의 점 에 대하여, 하단의 그림과 같이 정의되는 에 대하여로 표현된다. 이 때, 세 실수 쌍 를 의 원통좌표(cylindrical coordinates)라고 하며, 이러한 방식으로 점을 표현하는 시스템을 원통좌표계(cylindrical coordinates system)라 한다.

의 평면 상에서 원통좌표의 는 상수 로 고정되어, 나머지 두 변수 만이 남아 극좌표와 동일한 정의를 가지게 됩니다. 따라서 원통좌표와 직교좌표의 변환 관계 또한 극좌표의 경우와 거의 동일합니다.
이러한 원통좌표계는 선형 스프링과 같은 도형, 즉 하나의 축(대개 z축)에 대하여 회전대칭인 것을 표현할 때 유용하게 사용됩니다.
- Sample Problem 4.4.
3차원 카테시안 공간의 지점 을 원통좌표로 표현하여라.
“ 구면좌표계
- Definition 4.6. Spherical Coordinates
3차원 카테시안 공간(혹은 입체)상의 점 에 대하여, 하단의 그림과 같이 정의되는 에 대하여로 표현된다. 이 때, 세 실수 쌍 를 의 구면좌표(spherical coordinates)라고 하며, 이러한 방식으로 점을 표현하는 시스템을 구면좌표계(spherical coordinates system)라 한다.

이 좌표계를 구면좌표계라 부르는 이유는, 의 상수로 고정시켰을 때 나머지 두 변수 의 변화에 따른 자취가 반경 상의 구면을 움직이기 때문입니다. 지표면 상의 위도, 경도 체계가 바로 이 구면좌표계를 차용한 대표적인 사례라고 할 수 있죠. 앞의 두 좌표계와는 다르게, 구면좌표계는 점의 중복된 표현이 없는 것이 편하기 때문에2, 통상적으로 다음과 같이 세 변수 의 정의역을 설정합니다.
구면좌표와 직교좌표 간의 변환관계는 다음과 같습니다.
- Sample Problem 4.5.
3차원 카테시안 공간 상의 어떤 부피 가으로 표현될 때, 구면좌표계의 세 변수 를 이용하여 를 표현하여라.
카테시안 공간의 직교 좌표계로부터, 위에서 배우신 세 가지 좌표계를 이용하여 특정 지점의 표시를 자유자재로 바꿀 수 있을 때까지 여러 번의 연습을 해보시길 바랍니다. 공간과 좌표계의 개념을 모두 습득함으로써, 우리는 이제 벡터가 뛰어놀 수 있는 장소를 마련한 셈입니다. 다음 포스팅부터는, 본격적으로 벡터 미적분학의 막이 열리겠습니다.
고등학교때부터 만나서 익숙한 친구이지만, 그보다 더욱 심오한 원리를 담고 있는, 벡터 미적분학 이야기의 첫 번째 주인공인 벡터(vector)에 대해 배워보도록 하죠. 다음 시간에 만나요!
'지난 연재물 - 수학 & 통계학 > [벡터 미적분학] 나누고 쌓는 벡터 미적분학 by EsJay' 카테고리의 다른 글
| Vector Calculus 07. Vectors _ 02 (2) | 2017.06.09 |
|---|---|
| Vector Calculus 06. Vectors _ 01 (0) | 2017.06.02 |
| Vector Calculus 04. Space and Coordinate System _ 01 (1) | 2017.03.21 |
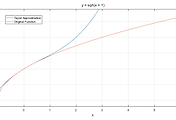
| Vector Calculus 03. Taylor Expansion (0) | 2016.12.31 |
| Vector Calculus 02. Power Series (0) | 2016.12.18 |


댓글